
Carreras de carritos 1° A
- AGR
- Web , Programación
- 05 Jan, 2025
Índice
- Índice
- Explicación del Proyecto
- Desarrollo
- Electrónica
- Tabla de Conexiones
- Programación
- Diagrama de flujo de la programacion del carrito
- Recursos
Explicación del Proyecto
Materiales necesarios
| # | Componente | Imagen | Link |
|---|---|---|---|
| 1 | Arduino NANO |  | link |
| 1 | Shield Compatible con Arduino UNO |  | link |
| 1 | Servomotor MG90S Servomotor 180° con Engranes Metálicos |  | link |
| 4 | Llanta para Motorreductor TT de 66x27mm |  | link |
| 1 | L298N Módulo Driver Motor A pasos | 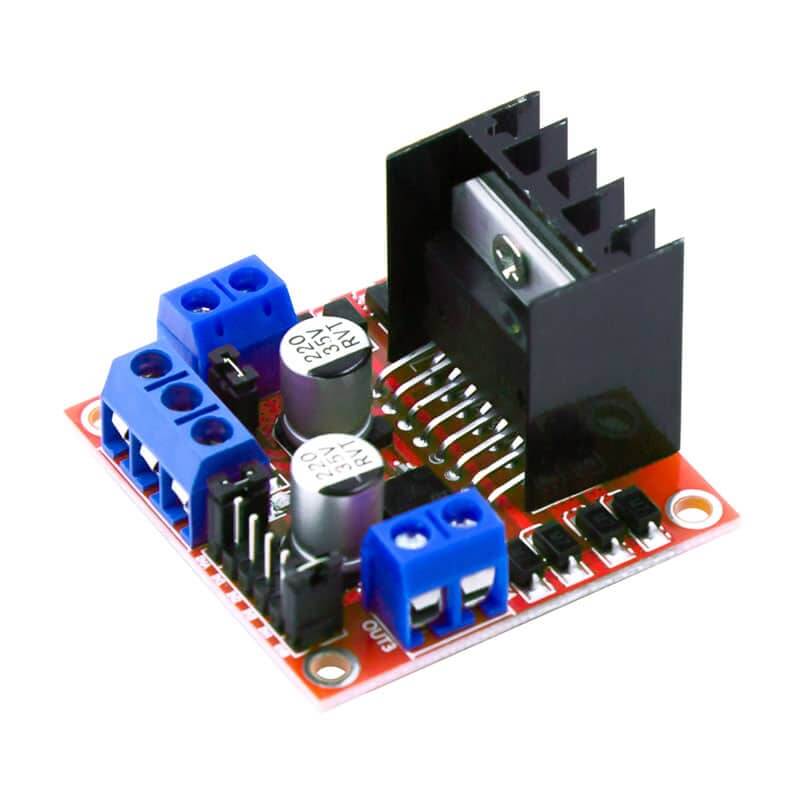 | link |
| 1 | Bluetooth HC-05 Maestro Esclavo 6 pines | 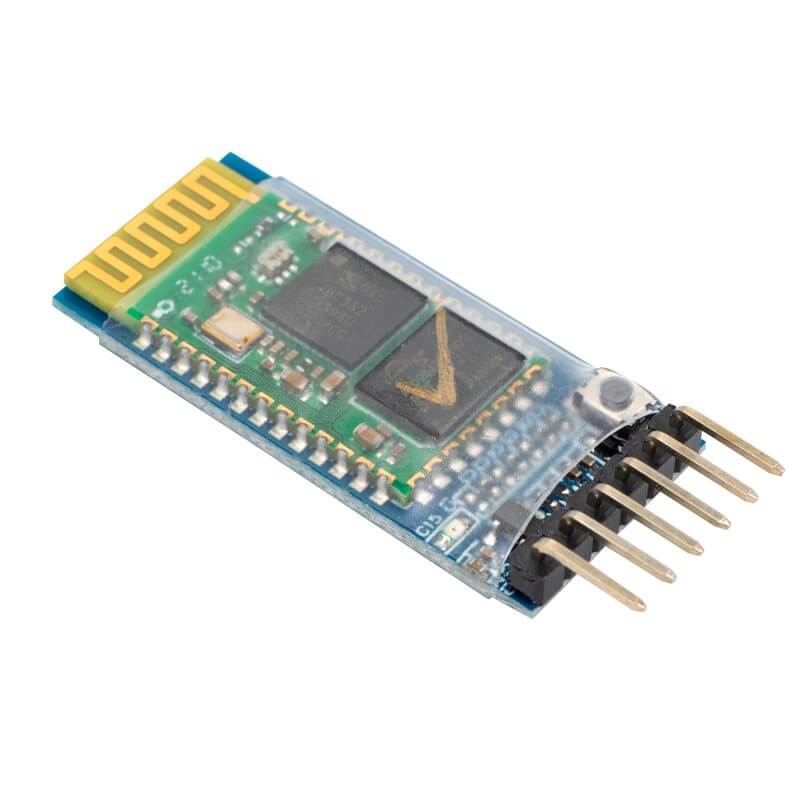 | link |
| 1 | Motorreductor Amarillo Para Carrito 48:1 |  | link |
Herramientas
- 1 Destornillador
- 1 Pinza
- 1 Tijera
- 1 Cautín
- 1 Soldadura
- 1 Cableado
Desarrollo
Electrónica
Realiza el siguiente diagrama de conexión
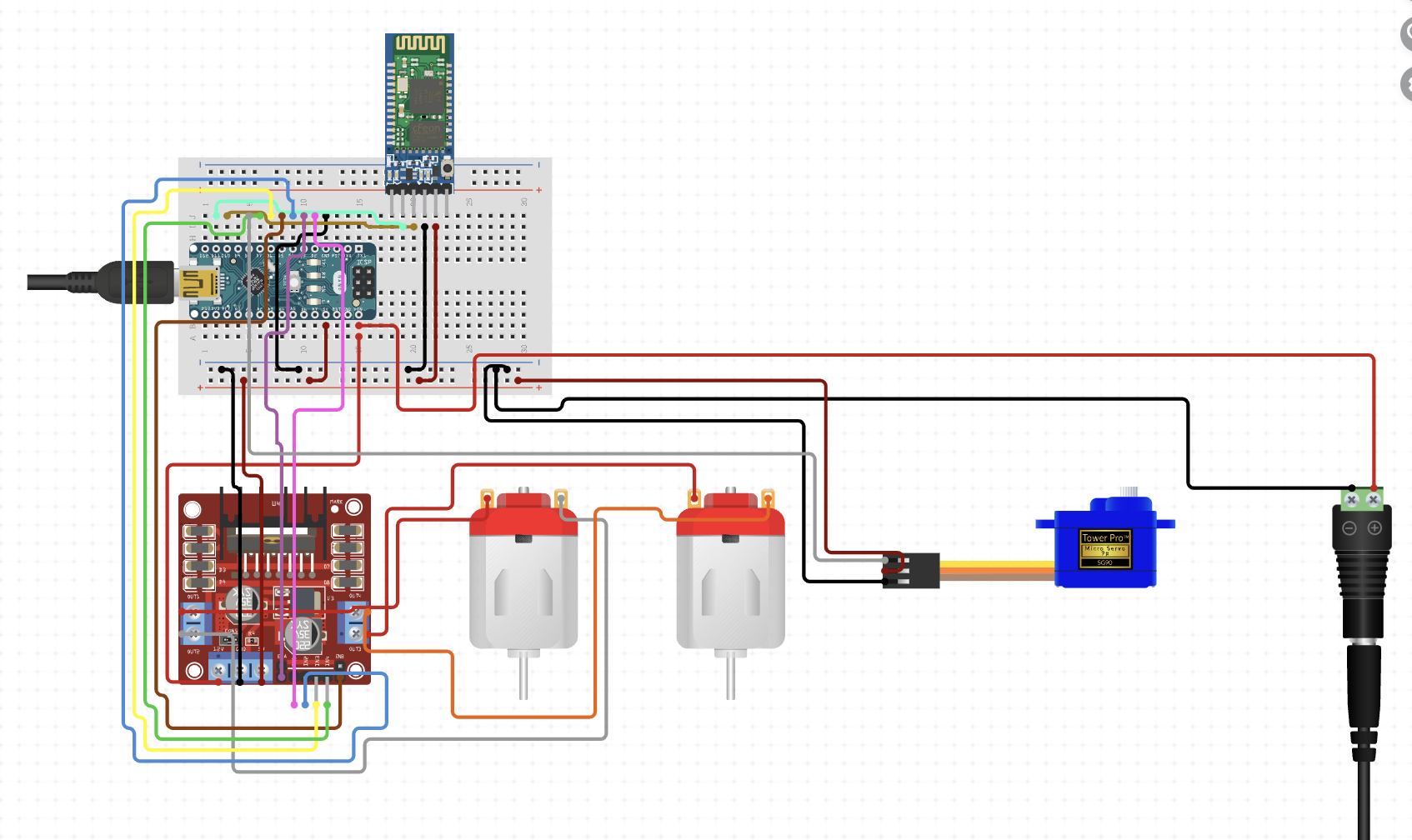 El siguiente diagrama es opcional en caso de tener un arduino uno
El siguiente diagrama es opcional en caso de tener un arduino uno
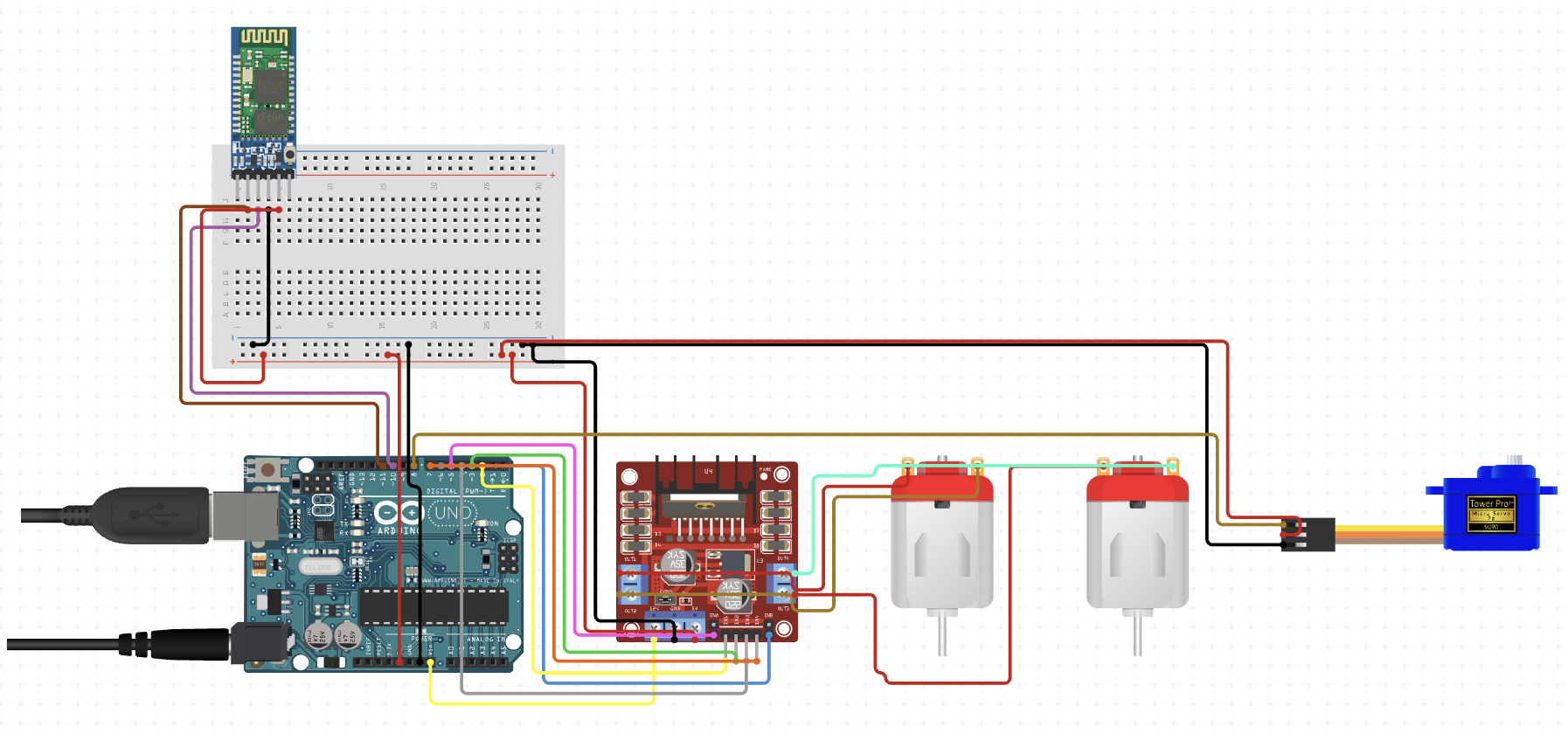
Tabla de Conexiones
| Componente | Pin Arduino Nano | Pin Componente |
|---|---|---|
| L298N IN1 | D7 | IN1 del controlador L298N |
| L298N IN2 | D8 | IN2 del controlador L298N |
| L298N Enable | D9 | ENA del controlador L298N |
| Servo | D6 | Señal del servo |
| HC-05 VCC | 5V | VCC del módulo HC-05 |
| HC-05 GND | GND | GND del módulo HC-05 |
| HC-05 TX | D10 | RX del Arduino Nano (usar divisor de voltaje si necesario) |
| HC-05 RX | D11 | TX del Arduino Nano |
| L298N VCC | 12V (fuente externa) | VCC del controlador L298N |
| L298N GND | GND | GND del controlador L298N |
| L298N OUT1 y OUT2 | Motores | Cables del motoreductor trasero |
Programación
#include <Servo.h>
#include <SoftwareSerial.h>
// Pines del L298N
const int motorIn1 = 7;
const int motorIn2 = 8;
const int motorEnable = 9;
// Servo
Servo steeringServo;
const int servoPin = 6;
// Comunicación Bluetooth con SoftwareSerial (pines 10: RX y 11: TX)
SoftwareSerial BTSerial(10, 11);
char command = 'S'; // Comando actual (S: Stop)
unsigned long lastCommandTime = 0;
const unsigned long timeout = 200; // Tiempo en ms sin recibir comando para detener el carrito
void setup() {
pinMode(motorIn1, OUTPUT);
pinMode(motorIn2, OUTPUT);
pinMode(motorEnable, OUTPUT);
steeringServo.attach(servoPin);
steeringServo.write(90); // Centra el servo
Serial.begin(9600); // Monitor serial para depuración
BTSerial.begin(9600); // Comunicación con HC-05
Serial.println("Carrito listo para recibir comandos:");
stopCar(); // Inicializa con el carrito detenido
}
void loop() {
// Procesa todos los comandos disponibles y actualiza el comando actual
while (BTSerial.available()) {
char inChar = BTSerial.read();
// Ignora caracteres de nueva línea o retorno de carro
if (inChar == '\n' || inChar == '\r') {
continue;
}
command = inChar;
lastCommandTime = millis(); // Actualiza el tiempo del último comando recibido
Serial.print("Comando recibido: ");
Serial.println(command);
}
// Ejecuta el comando actual
controlCar(command);
// Si no se recibe comando en 'timeout' ms, detiene el carrito
if (millis() - lastCommandTime > timeout) {
if (command != 'S') { // Solo actúa si no está ya detenido
command = 'S';
stopCar();
Serial.println("Timeout: Deteniendo carrito");
}
}
// Retardo breve para evitar saturación del loop
delay(10);
}
void controlCar(char cmd) {
switch (cmd) {
case 'F': // Avanzar
digitalWrite(motorIn1, HIGH);
digitalWrite(motorIn2, LOW);
analogWrite(motorEnable, 255);
// Retardo breve para dar estabilidad a la acción
delay(20);
break;
case 'B': // Retroceder
digitalWrite(motorIn1, LOW);
digitalWrite(motorIn2, HIGH);
analogWrite(motorEnable, 255);
delay(20);
break;
case 'L': // Girar a la izquierda
steeringServo.write(45);
break;
case 'R': // Girar a la derecha
steeringServo.write(135);
break;
case 'S': // Detenerse
stopCar();
break;
default:
Serial.println("Comando no reconocido");
break;
}
}
void stopCar() {
digitalWrite(motorIn1, LOW);
digitalWrite(motorIn2, LOW);
analogWrite(motorEnable, 0);
steeringServo.write(90); // Centra el servo
}
Comandos Bluetooth
- F: Avanzar.
- B: Retroceder.
- L: Girar a la izquierda.
- R: Girar a la derecha.
- S: Detener.
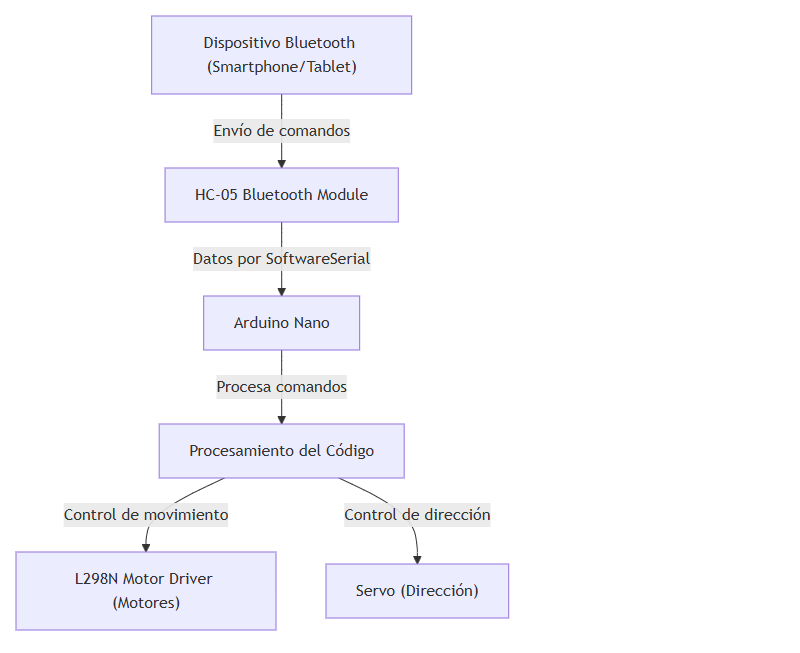
Diagrama de flujo de la programacion del carrito
Recursos
Videos
Video de ensamble de brazo robotico
Código
aqui el codigo Enlaces
Enlaces a web Chareditor.
Enlaces a blog Instalacion de arduino.
![ATR 1° - 2° [Primaria]](/_astro/programacion-scratch.CFxgyuxG_1Scdju.webp)

![Elevador 5° [Primaria]](/_astro/elevador.BOkYr5DS_V4kCV.webp)
![Figuras con luz 1° - 2° [Primaria]](/_astro/figuras-luz.CbuO9Ig-_1qfbDh.webp)
![Semáforo con pluma de crucero 4° [Primaria]](/_astro/semaforos-crucero.DI8BpGIw_Z2uD7Ww.webp)
